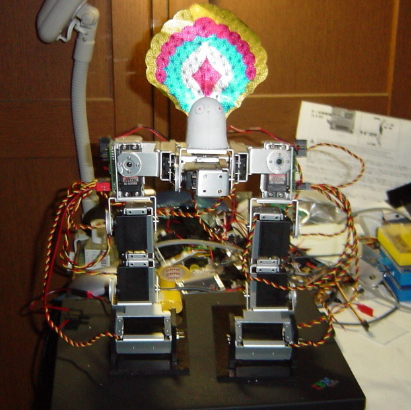
ROBO-ONE出場を目指して、
孔雀型二足歩行ロボット
ブラッククジャック最新バージョン
最初と比べて随分と別物になりました
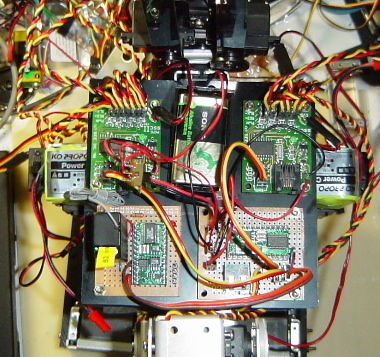
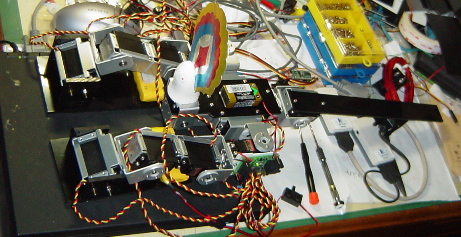
背中に背負ったマイコン基盤です
上の緑色の基盤二つがサーボの制御用です
右下が動作パターンなどが書き込まれている制御用です
左下がラジコンの受信機をデコードしてシリアル信号に変換する基盤です
資格審査時にはこのマイコンに動作の順序を書き込んで自律動作させます。
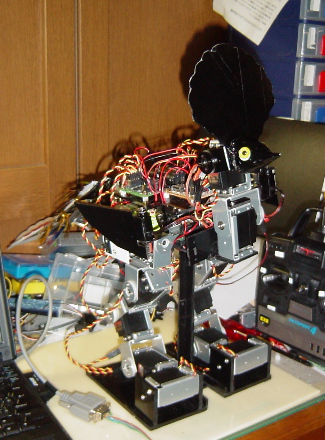
仮頭に続き尻尾も付けてみました、
これから尻尾の開閉機構を作ろうと思うのですが、そうやったらうまくいくか?
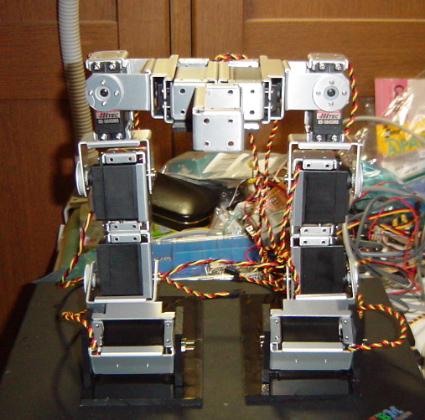
とりあえずは、電源を入れて立つだけは出来るようになりました。
もう少し、ニュートラル位置の調整をしてみてから本格的に動かしたいです。
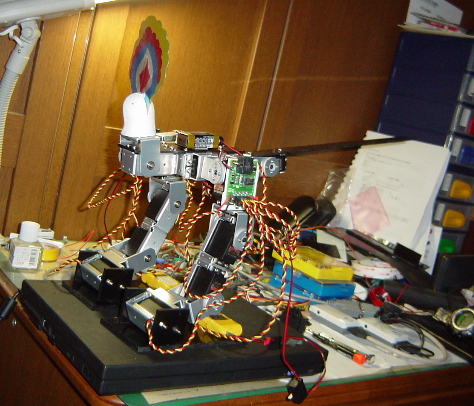
電源を入れないで座っている状態
作成中の写真です、やっと、足が出来ました
これから、頭と尻尾をつけないと、
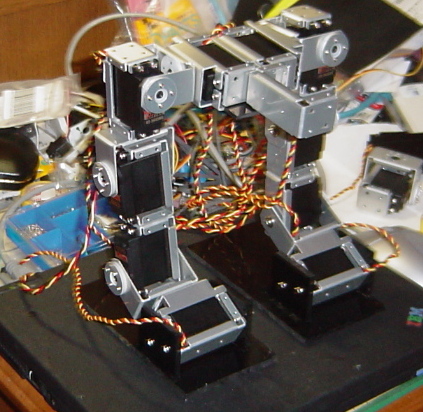
仮の頭を乗っけてみました。